|

|
|

도심 완전 자율주행 딥테크 스타트업 ‘라이드플럭스’가 캐나다 밴쿠버에서 열린 세계 최고 권위의 인공지능 학회 ‘CVPR 2023’에서 자율주행 기술 논문을 발표하며 자사 기술을 소개했다.
컴퓨터 비전 및 패턴 인식(Computer Vision and Pattern Recognition, CVPR) 학회는 매년 애플, 구글 등 세계적인 IT 기업과 연구기관들의 논문을 선정해 인공지능 분야의 새로운 기술과 연구 성과를 공유한다.
자율주행 업계에서도 웨이모, 테슬라, 모셔널(Motional), 죽스(ZooX) 등 글로벌 리딩 기업들이 다수 참여한다.
라이드플럭스는?
도심 환경에서의 완전 자율주행 소프트웨어를 풀스택(Full-stack)으로 연구·개발하는 스타트업이다. 자율주행 소프트웨어와 관련해 GUI 프론트엔드부터 데이터베이스 백엔드에 이르기까지 모두 개발한다.
2018년 설립 이후 쏘카 등으로부터 투자를 유치하고, 완전 자율주행 상용화 기술을 고도화하며 업계를 리딩하고 있다.
비정형 객체 탐지 성능 향상…최고점 기록
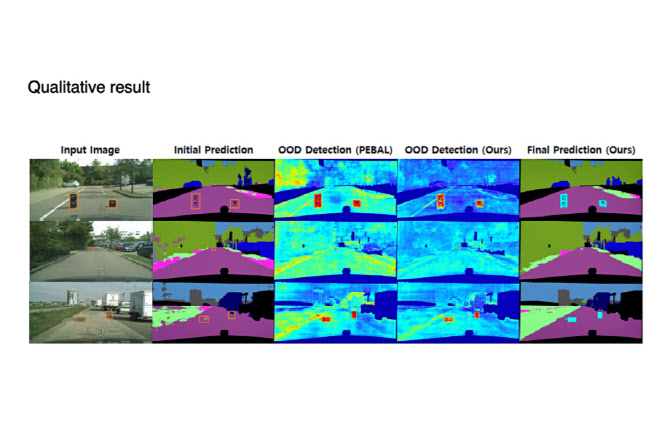
라이드플럭스는 CVPR 본 학회에서 ‘Balanced Energy Regularization Loss for Out-of-distribution Detection’을 주제로 인공지능 SW의 비정형 객체 탐지 성능을 향상시키기 위한 새로운 학습 방법을 제안했다.
이 새로운 학습 방법은 기존에 연구된 벤치마크 데이터의 알고리즘 성능 평가에서 세계 최고점을 기록했다.
비정형 객체 탐지 기술은 완전 자율주행차가 복잡한 도심 환경의 도로 상황을 보다 정확하게 인지하고, 돌발 상황에 안전하게 대응하기 위해 반드시 필요한 기술이다.
인공지능이 미리 학습하지 않은 객체는 장애물로 인식되지 않거나 잘못 인식되는 경우가 있어, 보다 안전한 자율주행을 위해 인지 기능이 중요하다.
논문의 공동저자인 정하욱 라이드플럭스 부대표는 “이번 연구 성과는 완전 자율주행 서비스의 안전성을 향상시키는 데 큰 도움이 될 것“이라면서 “누구나 믿고 이용할 수 있는 자율주행 서비스를 제공하기 위해 기술 고도화에 최선을 다하겠다”고 했다.




